Aquaplaning Detection: Effect-Based Technologies

Automotive engineers are shifting from hardware-intensive sensor arrays to software-defined systems that read a vehicle’s own dynamic response through its CAN network to detect aquaplaning in real time. This transition is redefining how ADAS platforms manage one of the most persistent causes of weather-related crashes on public roads.
What Happened / The Technology
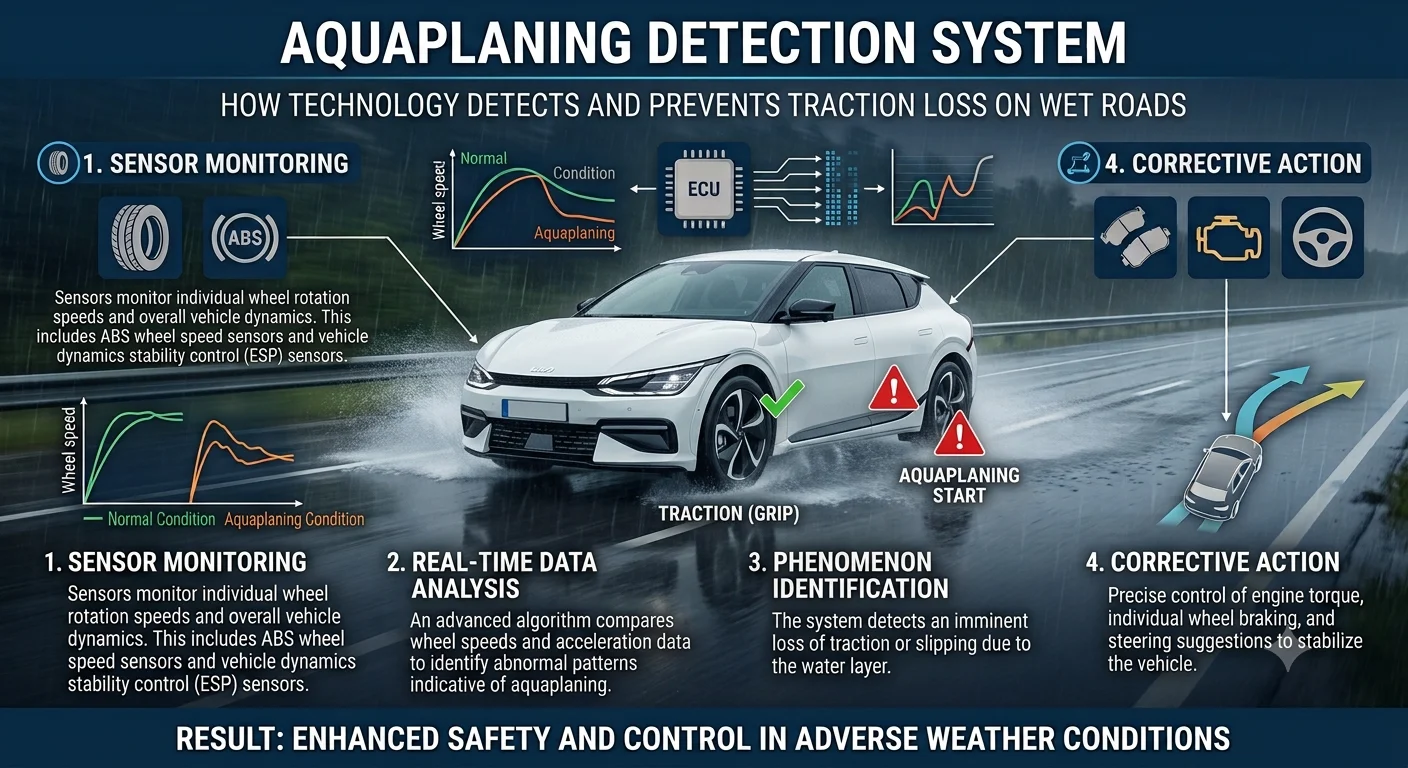
The core concept behind effect-based aquaplaning detection is straightforward: rather than installing dedicated optical or acoustic sensors to measure standing water depth, the system analyzes data already flowing through the vehicle’s Controller Area Network (CAN) bus. Signals from existing ABS and ESC modules – including longitudinal and lateral force vectors and wheel speed differentials – are processed by embedded algorithms that identify the characteristic signatures of low-μ (low friction) conditions.
When a tire begins to hydroplane, it loses contact with the road surface and its behavior diverges measurably from normal rolling dynamics. Effect-based platforms detect this divergence in milliseconds, generating a tiered warning output without requiring any additional physical hardware. The vehicle’s existing sensor infrastructure becomes, in effect, a virtual sensing layer.
Easyrain’s DAI – Virtual Sensor Platform implements this approach, detecting both partial and full aquaplaning conditions and delivering real-time low-μ alerts to ADAS control units. The system operates independently of tire manufacturer specifications, internet connectivity, cloud services, or artificial intelligence models, which allows it to function across vehicle platforms and road environments without retraining or recalibration.
Why It Matters
According to the U.S. Federal Highway Administration (FHWA), approximately 70% of weather-related vehicle crashes occur on wet pavement and during rainfall. This figure represents a structural gap in current ADAS design: most Level 2 and Level 3 systems are optimized for dry or clear-weather conditions and lack reliable input on pavement grip when water is present.
Effect-based aquaplaning detection closes that gap by providing ADAS control units with the grip-state data they need to adjust braking distances, adaptive cruise control thresholds, and steering response before a loss of control event occurs. The National Highway Traffic Safety Administration (NHTSA) has identified real-time grip awareness as a prerequisite for safe deployment of automated driving systems at Level 3 and above.
The implications extend beyond individual vehicle safety. When aquaplaning detection data is aggregated and shared, it enables infrastructure-level awareness of road hazard conditions – a capability addressed by Easyrain’s ERC – Cloud Infrastructure, which collects vehicle-specific road surface data and distributes it via V2X (Vehicle-to-Everything) protocols to surrounding vehicles and fleet operators.
Key Data
- 70% of weather-related crashes in the U.S. occur on wet pavement (FHWA)
- Effect-based detection operates on existing CAN bus signals – zero additional hardware required
- DAI detects partial and full aquaplaning with independent side sensing capability
- Detection latency: milliseconds, enabling pre-event ADAS intervention
- System operates without dependency on tires, AI models, cloud connectivity, or internet data
Market Context
The automotive industry’s broader transition to software-defined vehicles (SDV) is accelerating adoption of virtual sensor technologies. OEMs under regulatory and consumer pressure to expand all-weather ADAS performance are increasingly evaluating solutions that can be integrated through software updates rather than hardware redesigns. This reduces per-unit cost, simplifies homologation across vehicle lines, and shortens development cycles.
Effect-based aquaplaning detection fits precisely within this framework. Because it relies on signals already present in production vehicles, it can be deployed across existing platform families without retooling. For autonomous driving programs targeting Vision Zero – the goal of eliminating road fatalities – wet-road grip detection represents a critical missing layer. Easyrain’s AIS – Active Safety System complements the virtual sensing layer with a hardware module that actively restores grip by spraying pressurized fluid ahead of the front tires, achieving a reported 20% reduction in braking distance on heavy wet surfaces and a 225% increase in lateral traction during aquaplaning events.
What to Expect Next
Regulatory frameworks governing ADAS performance in wet conditions are expected to tighten across both the European Union and North American markets over the coming years. Euro NCAP protocols are already incorporating wet-road AEB (Autonomous Emergency Braking) testing scenarios, placing direct pressure on OEMs to validate system behavior on low-μ surfaces. The integration of effect-based aquaplaning detection into type-approval testing cycles would formalize the technology’s role in baseline vehicle safety.
On the connectivity side, V2X data pipelines fed by cloud platforms such as ERC are positioned to evolve into predictive hazard mapping tools – flagging aquaplaning-prone road segments in advance rather than reacting to conditions already encountered. Fleet operators and city traffic management systems are identified as early adopters, given the operational and liability incentives for real-time road risk monitoring.