Why Adaptive Cruise Control Fails on Wet Roads – and How Real-Time Friction Data Changes the Equation

Adaptive Cruise Control (ACC) systems are designed for controlled highway conditions. When rain, standing water, or low-grip surfaces enter the picture, the architecture of most ACC implementations reveals a critical gap: the systems operate without any awareness of the friction coefficient between the tires and the road. An emerging category of virtual sensor technology, including Easyrain’s DAI Virtual Sensor Platform, is addressing this gap by feeding real-time road surface data directly into ADAS decision loops.
What the Testing Protocols Don’t Cover
Major safety bodies have calibrated their ADAS evaluation frameworks around optimal conditions. The Insurance Institute for Highway Safety (IIHS) tests partial driving automation systems exclusively on flat, dry roads, under daylight illumination exceeding 2,000 lux. Rain and wet-road scenarios are explicitly excluded from the protocol. This means that consumer safety ratings for ACC – the figures that inform purchase decisions – reflect system performance in conditions that represent only a fraction of real-world driving.
Euro NCAP has acknowledged this limitation and is revising its protocols for 2026, introducing requirements for robustness in adverse visibility and weather conditions. The shift signals a broader recognition across the industry that ADAS validation must expand beyond the test track.
The Physics Problem Standard ACC Cannot Solve
The National Highway Traffic Safety Administration (NHTSA) advises drivers against using any form of cruise control on wet or slippery roads. The reasoning is architectural, not incidental.
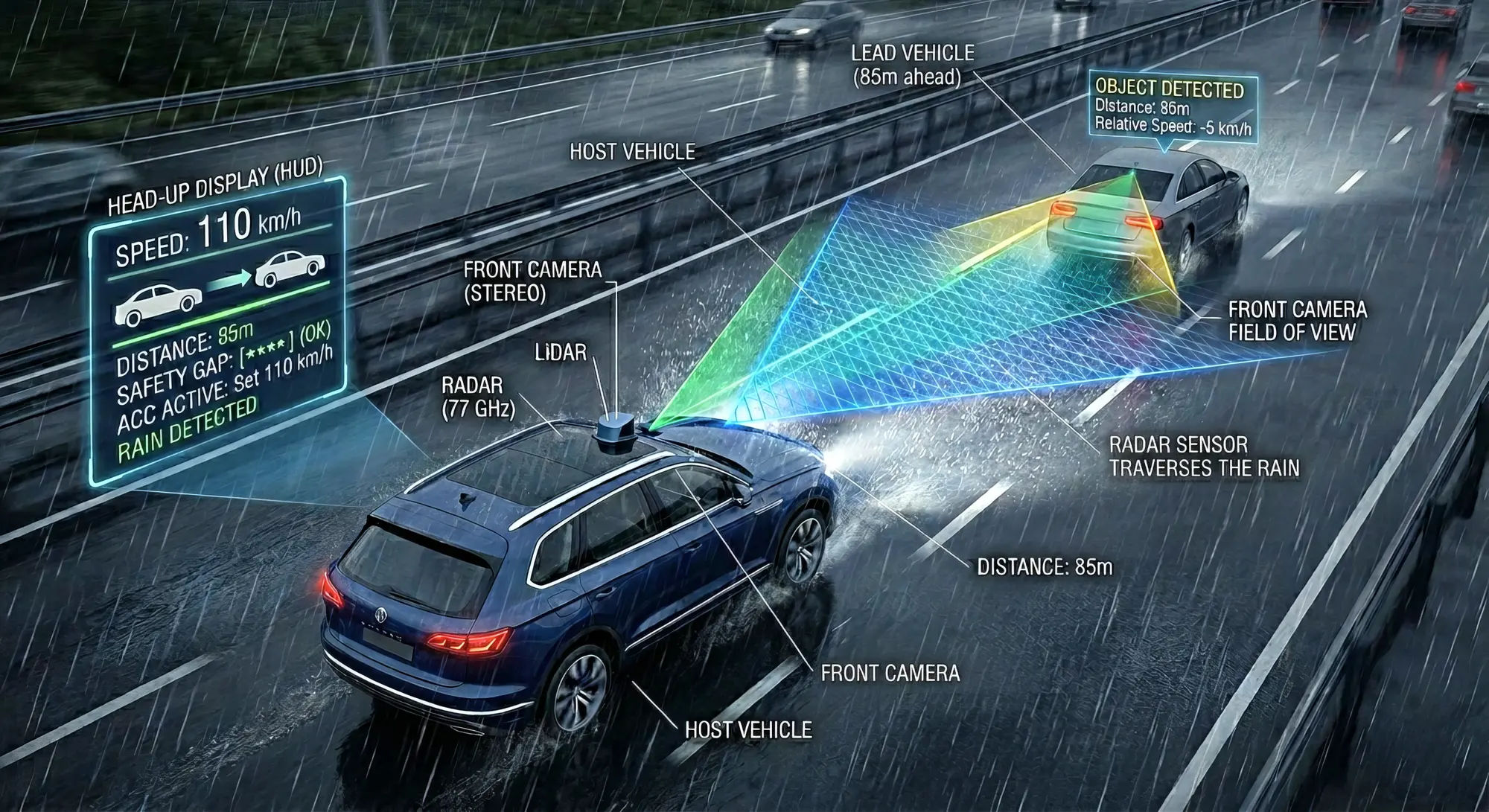
Standard ACC relies on radar and camera sensors to track leading vehicles and manage inter-vehicle spacing. These sensors can measure distance and relative velocity, but they do not measure road surface friction. The consequence is straightforward: an ACC system set to maintain 110 km/h on a motorway will continue to pursue that target whether the asphalt is dry at μ = 0.8 or saturated with standing water at μ = 0.3. The system has no mechanism to distinguish between the two.
In aquaplaning conditions, the hazard is compounded. When a tire loses contact with the road surface due to a water film, the safest immediate response is to reduce throttle smoothly. An active ACC system counteracts this instinct by attempting to maintain the set speed, delaying the driver’s ability to intervene. Research from the AAA Foundation for Traffic Safety confirms that active driver assistance systems show measurable performance degradation in rain, reinforcing concerns about driver over-reliance.
Heavy rain also degrades sensor perception directly. Radar returns can be corrupted by water droplet clutter, generating false obstacle detections – a phenomenon known as phantom braking. Camera systems lose lane-marking contrast and may misread road spray as solid obstacles. These failures can cause ACC to disengage abruptly, returning full control to a driver who may not be prepared to take over.
What Friction-Aware Systems Can Do
Engineering research over the past decade has mapped out how ACC behavior changes when a reliable friction estimate is available. A 2021 study published in MDPI Sensors demonstrated that integrating an on-board friction estimator into vehicle-following logic allows ACC to extend inter-vehicle spacing dynamically on wet surfaces, proportional to the degradation in available grip. A Chalmers University thesis on friction-aware Nonlinear Model Predictive Control for ACC showed that embedding friction constraints into the control algorithm prevents commanded braking or acceleration from exceeding what the road surface can physically support – a key safety requirement for autonomous operation. Earlier foundational work published in SAE International established machine learning approaches to real-time friction coefficient estimation from onboard vehicle dynamics signals.
The common thread across this research is that friction data transforms ACC from a system that assumes a constant physical environment into one that responds to actual road conditions.
Easyrain’s DAI Platform: A Software-Only Implementation
Easyrain’s DAI Virtual Sensor Platform is built on this principle. DAI processes signals already present in a vehicle’s existing sensor architecture – without requiring additional hardware – to detect aquaplaning in milliseconds, identify snow and ice before slip occurs, and continuously estimate road surface conditions. The system is self-calibrating, independent of tire specifications, and operates without cloud connectivity or AI co-processing at the edge.
This places DAI in a distinct product category. Where vision-based friction estimation requires camera inputs that themselves degrade in rain, DAI’s haptic-sense approach derives road surface state from vehicle dynamics data, making it effective precisely in the conditions where optical sensors struggle.
The data generated by DAI feeds upward into Easyrain’s AIS Active Safety System, which can physically restore grip by eliminating the water film ahead of the tires. At the fleet and infrastructure level, this surface-condition data aggregates into Easyrain’s ERC Cloud Infrastructure, enabling predictive hazard mapping across road networks.
The Standardization Gap and What Comes Next
The absence of wet-road testing in current IIHS and Euro NCAP protocols has practical consequences: OEMs developing ACC systems have no regulatory incentive to invest in friction awareness, and consumers have no standardized basis for comparing systems on this dimension. Euro NCAP’s 2026 protocol revisions begin to address this, but full implementation of friction-aware ADAS will require both regulatory pressure and available technical solutions.
The engineering literature establishes that ACC systems integrated with real-time friction data can increase safety margins on wet surfaces. The open variable is adoption pace across the automotive supply chain – which in turn depends on how quickly friction-aware virtual sensors reach integration-ready status for OEM use.